






The EzloPi smart devices provide automation through simple, customizable use with our open-source EzloPi platform, making daily life easier and improving human-machine interactions.
Before moving into this example, it is very important to know about the device registration, provisioning and converting the ESP32 device into an EzloPi device along with knowledge of Web Flasher, MiOS Mobile Application for Android/iOS and the MiOS Web Application.
1. About this example
This project aims to develop a collision avoidance system for marine navigation using the JSN-SR04T ultrasonic sensor and a buzzer, interfaced with the EzloPi device. The project continuously monitors the distance to obstacles in the water by emitting ultrasonic waves and measuring their echo. If the distance falls below a set threshold, the buzzer is triggered to alert the crew, allowing timely evasive actions. The JSN-SR04T’s waterproof design makes it ideal for harsh marine environments, while the EzloPi device provides real-time monitoring, ensuring efficient operation and enhancing navigation safety.
2. Project Demonstration Video
Welcome to the project demonstration video section. The following video showcases the key aspects of Collision avoidance system in marine navigation, providing a visual walkthrough of its implementation.
3. Circuit Diagram & Interface
The following components are required for interfacing with the EzloPi device:
- ESP32 as an EzloPi smart device.
- JSN-SR04T Ultrasonic sensor with analog to digital interface module.
- LED with 120 Ohm resistor
- MH-FMD Buzzer
The wiring diagram of ESP32 30 pin is represented as follows:
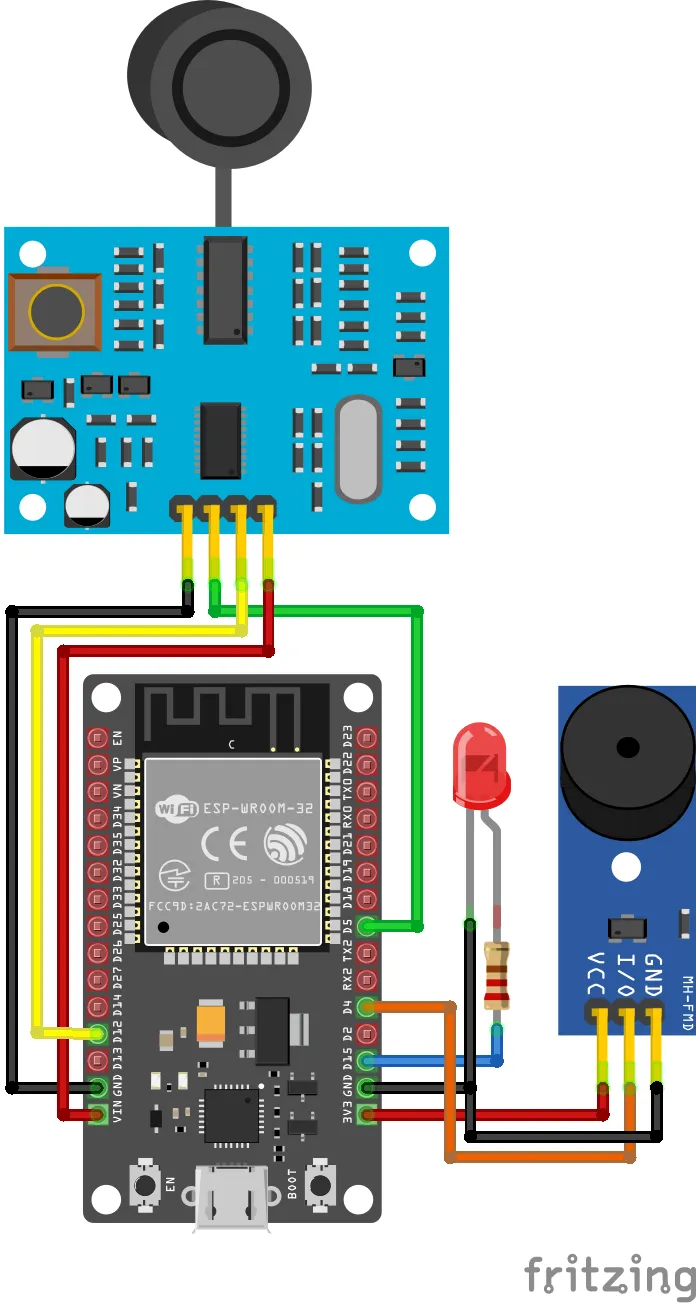

The following connections are made in order to complete the circuit setup.
From ESP32 to the JSN SR04T:
| ESP32 | JSN SR04T |
| VIN | VIN |
| GND | GND |
| D5 | ECHO PIN |
| D12 | TRIG PIN |
From ESP32 to the LED & Resistor:
| ESP32 | LED | Resistor |
| D15 | - | Terminal 1 |
| GND | Cathode | - |
| - | Anode | Terminal 2 |
From ESP32 to the Buzzer:
| ESP32 | Buzzer |
| 3V3 | VCC |
| GND | GND |
| D4 | I/O |
4. Interfacing the Ultrasonic sensor, LED & Buzzer with the EzloPi Web Flasher:
1. Set up your device/hardware by visiting config.ezlopi.com

- Log in using the credentials which you just set earlier while signing up.
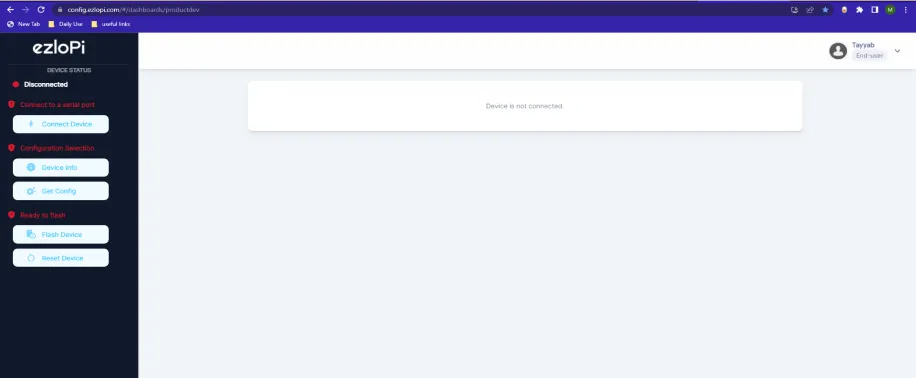
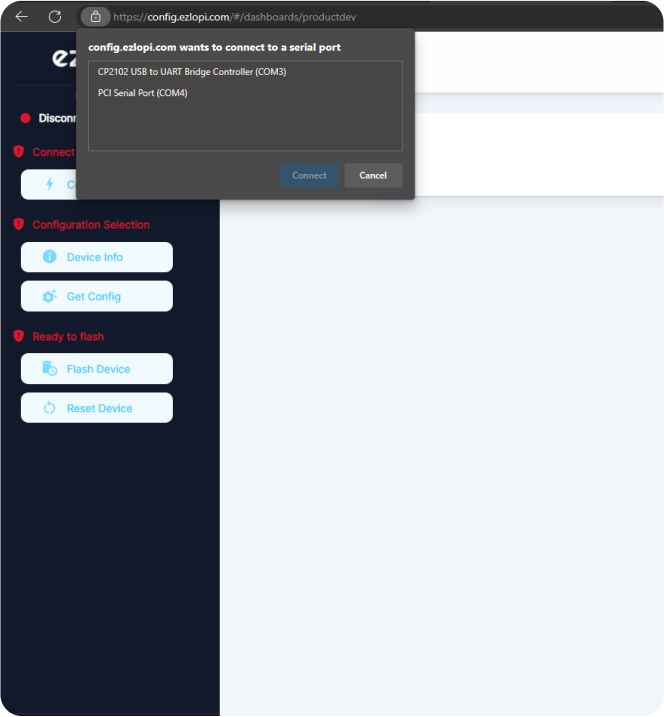
- Now, click on the Connect Device button and a pop-up window will appear.
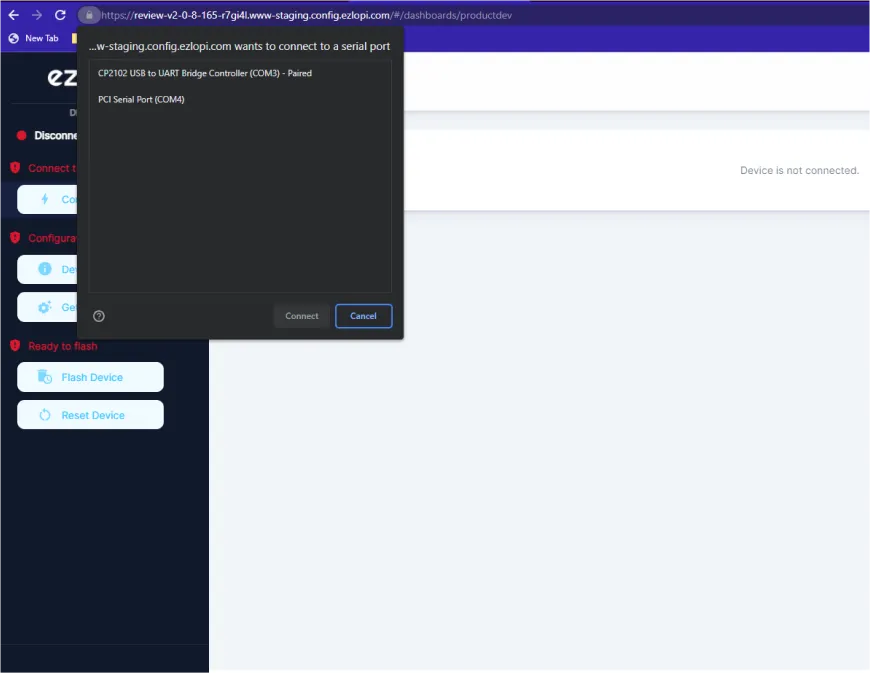
- Now, select COM Port to which your ESP32 device is connected. In our case, the COM3 port is used.
Click Connect
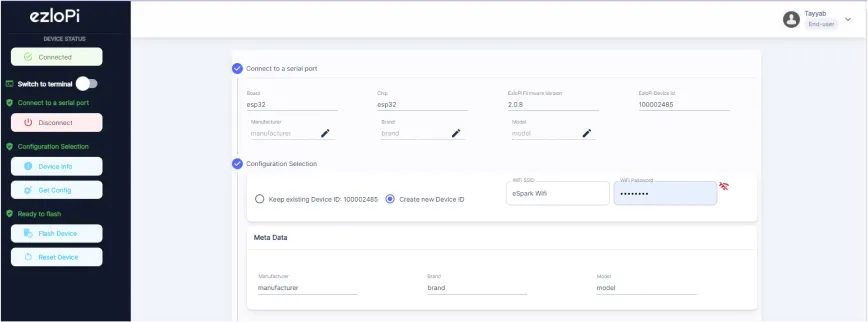
- If you are new to this and it's your first time configuring, select Create new Device ID. Enter Wifi SSID and Wifi Password.
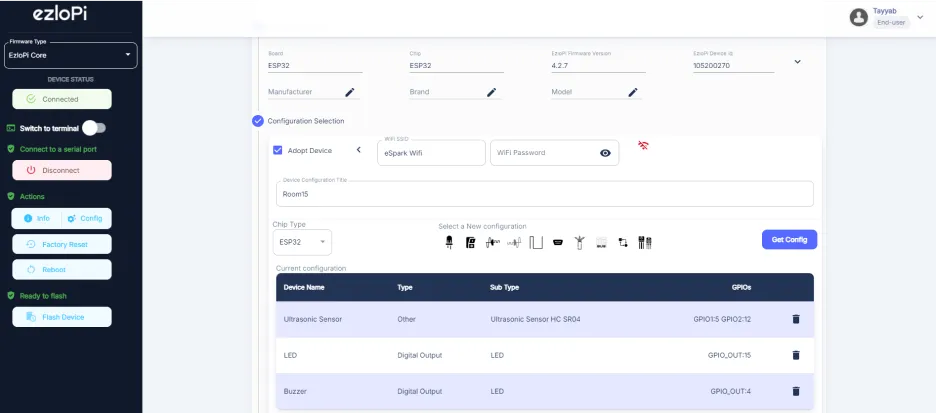
- In the Device Configuration, tab click on Other.
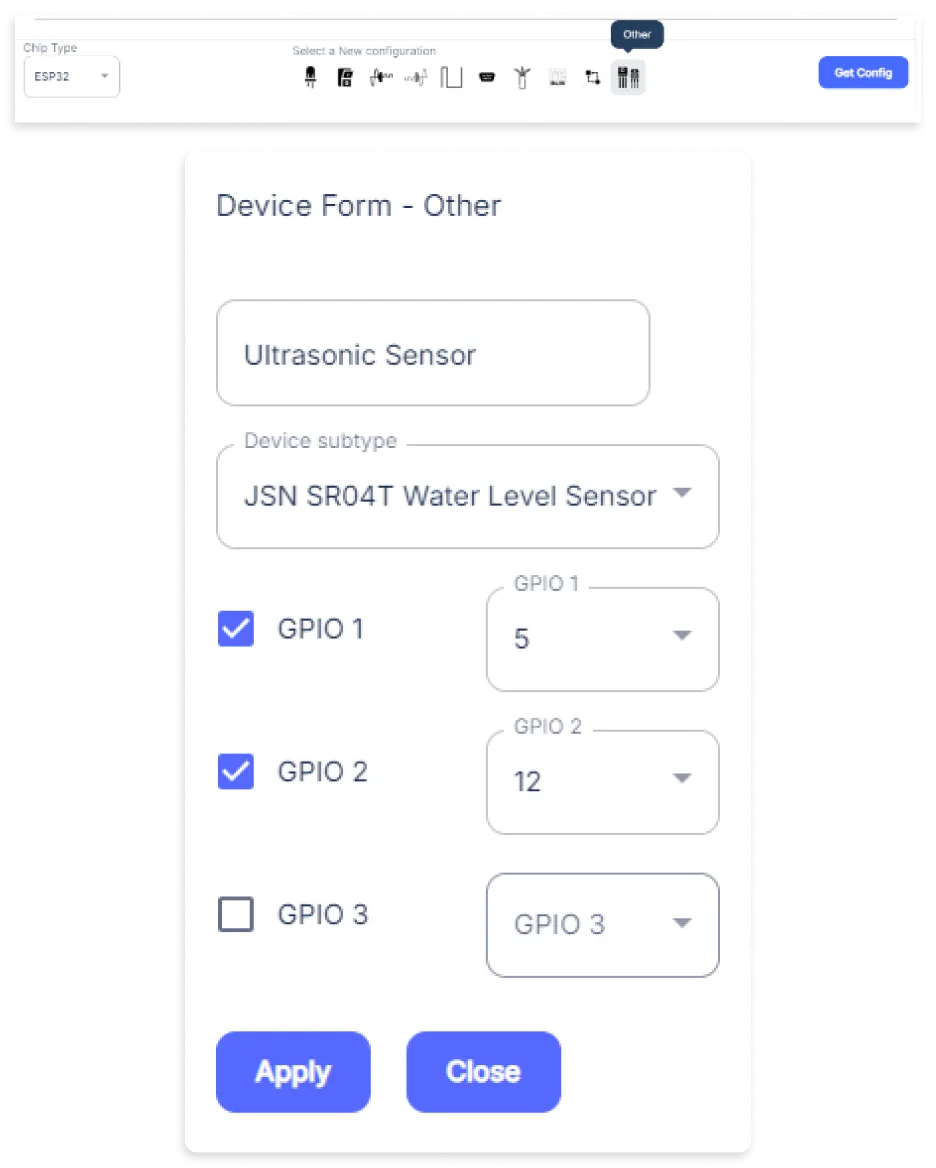
- An Other Input window will open for inputting the following parameters:
- Set a Device name of your choosing. In our case, we set it to Ultrasonic Sensor.
- Set Device Subtype to JSN SR04T Water Level Sensor.
- Tick mark the box of GPIO1 and Set the GPIO1 to 5.
- Tick mark the box of GPIO2 and Set the GPIO2 to 12.
- Then Click Apply Button.
- In the Device Configuration, tab click on Digital Output.
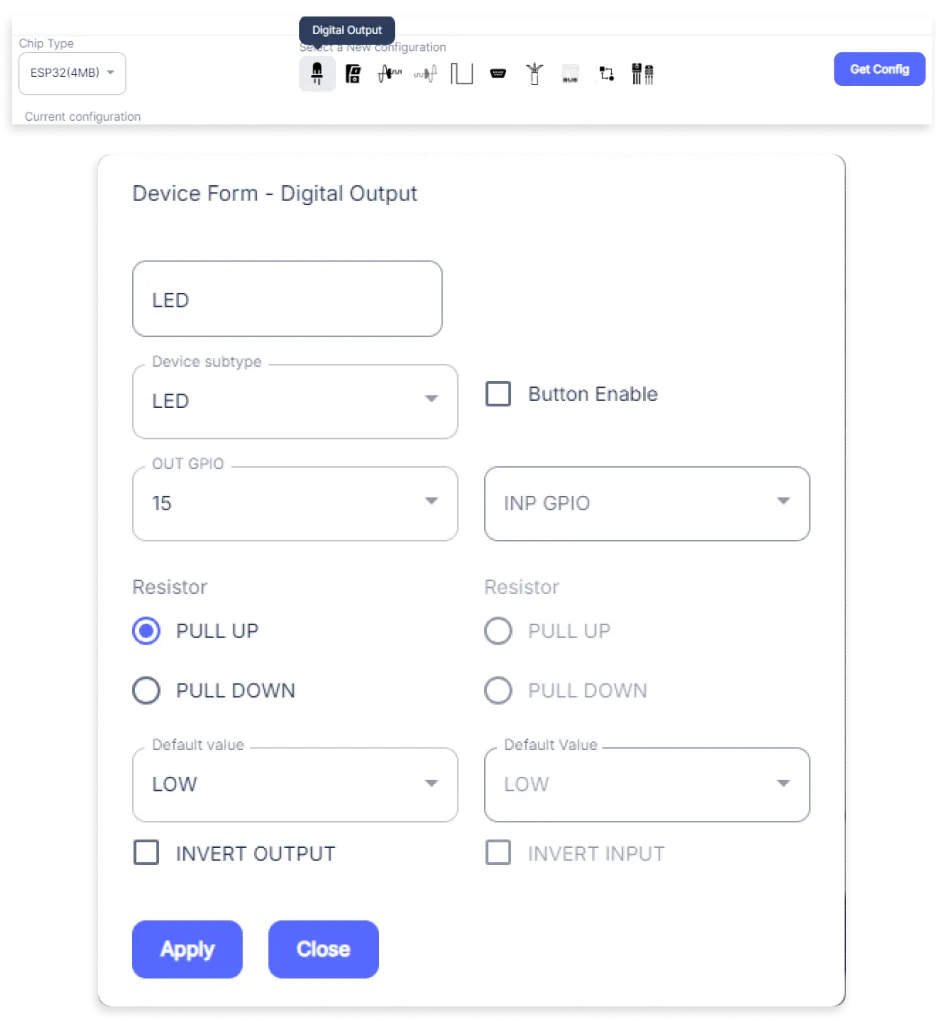
- A Digital Output window will open for inputting the following parameters:
- Set a Device name of your choosing. In our case, we set it to the LED.
- Set Device Subtype to LED.
- Set the OUT GPIO to 15.
- Set the Resistor to PULL UP.
- Then Click Apply Button.
- In the Device Configuration, tab click on Digital Output
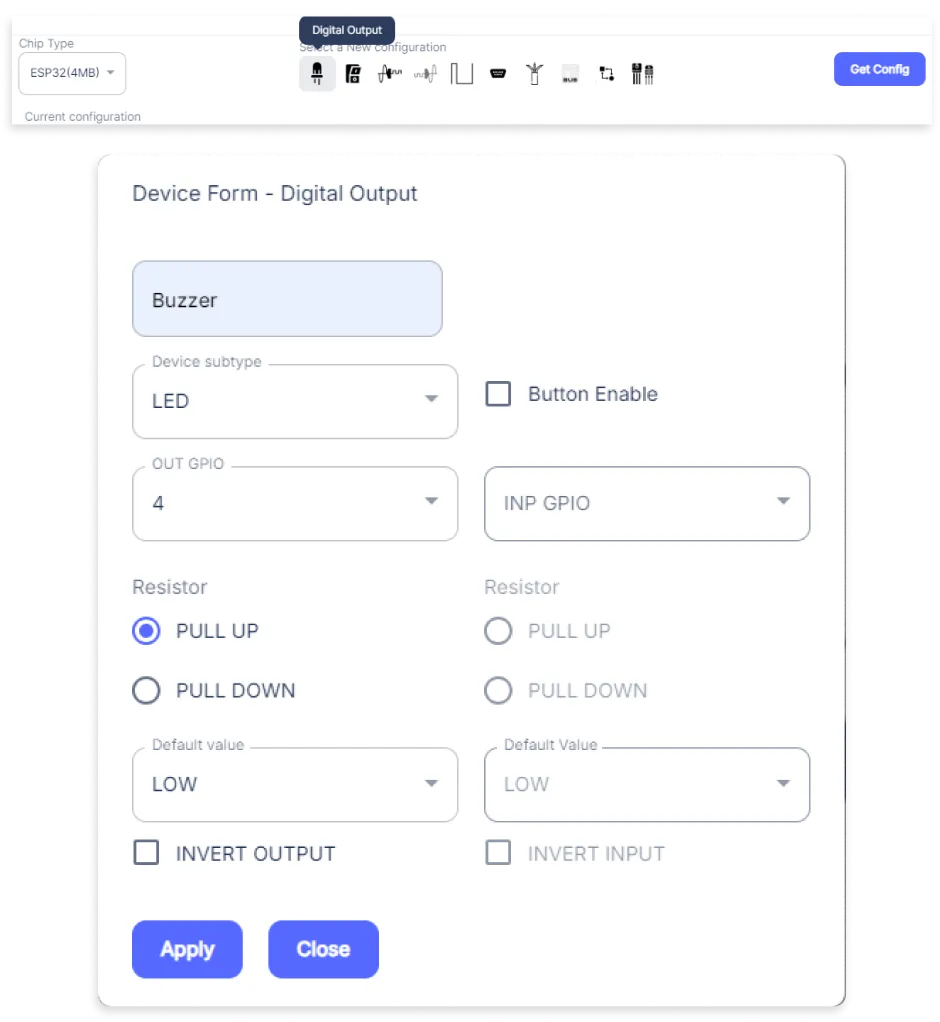
- A Digital Output window will open for inputting the following parameters:
- Set a Device name of your choosing. In our case, we set it to the Buzzer.
- Set Device Subtype to LED.
- Set the OUT GPIO to 4.
- Set the Resistor to PULL UP.
- Then Click Apply Button.
- After clicking the apply button you can see a table of your setting in the device configuration tab.
- Press the Flash Device button.
- A window will appear on the bottom right side of the screen displaying “Please press BOOT button while flashing begins.”
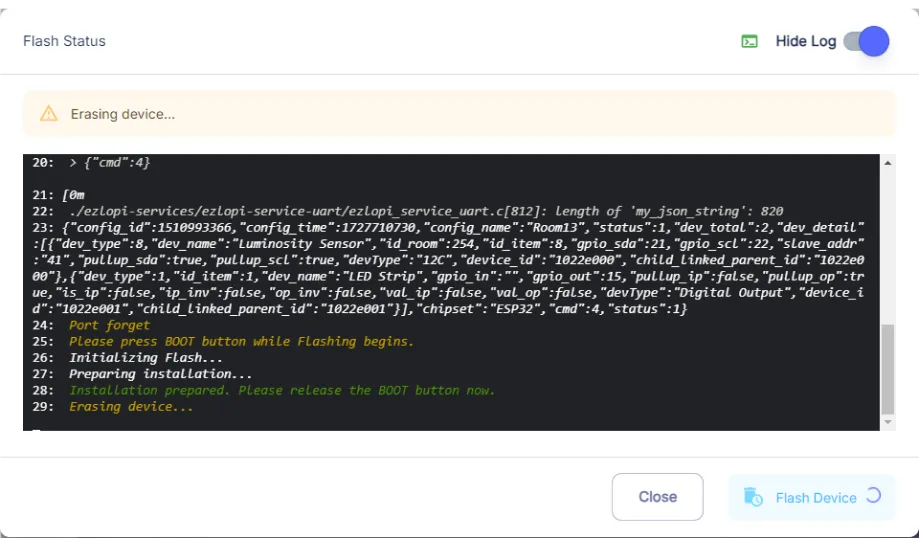
- Hold the BOOT button down until the next window appears on the bottom right side of the screen which says “Installation prepared. Please release the boot button now.”
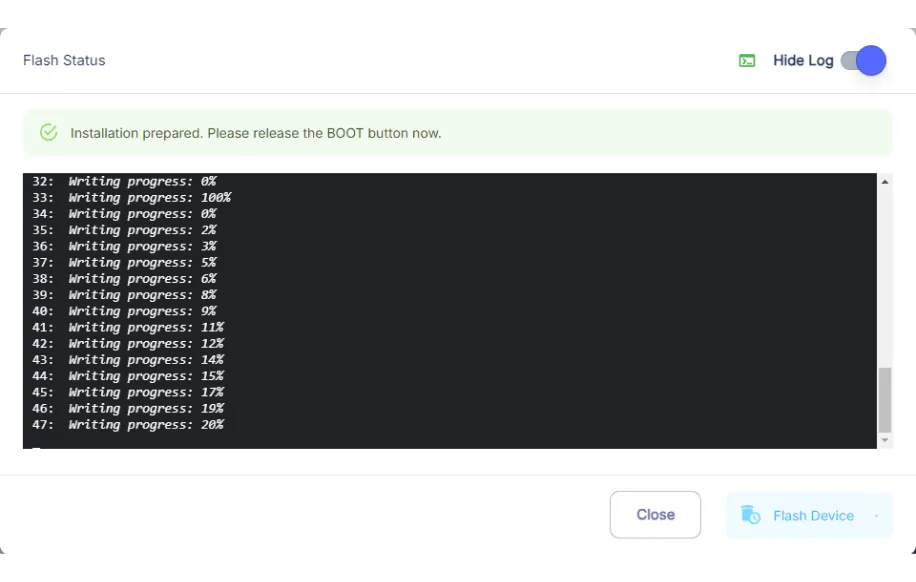
- Release the BOOT button from your ESP32 when this pop-up on the bottom right window appears.
- After some time, a popup will appear saying Device Flashed Successfully! This means that your device has been set up successfully.
5. MiOS Web Dashboard
- After configuring the controller with the EzloPi web flasher, head to ezlogic.mios.com

- Use the same credential to log in that you used for configuring the controller with the web flasher.
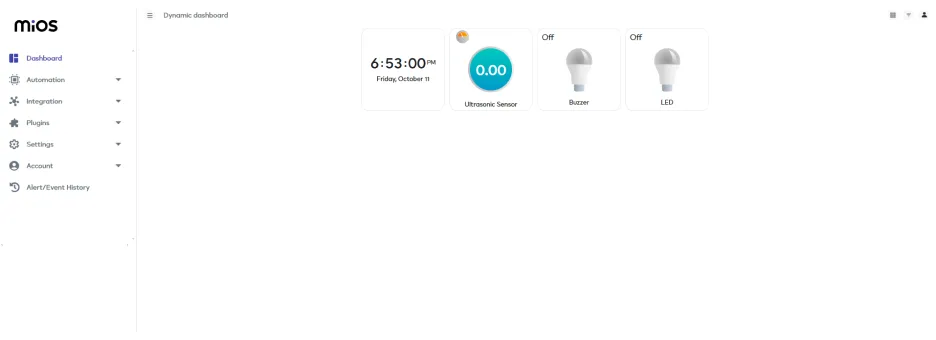
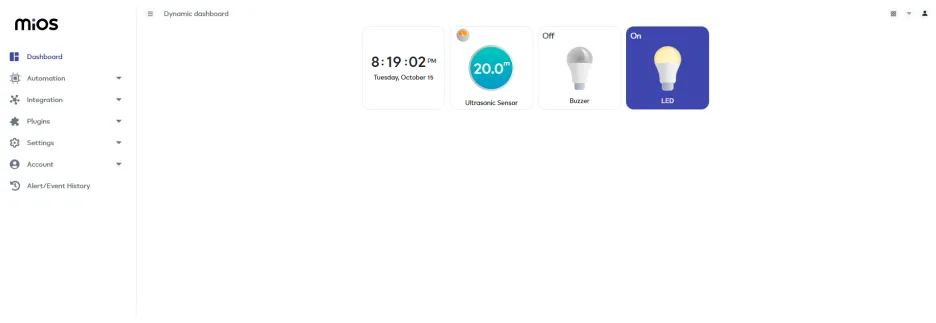
- Here, on the MiOS web dashboard, you will be able to see the tiles of connected devices. In our case we have a JSN-SR04T ultrasonic sensor, LED and buzzer tiles. The LED and buzzer tiles will indicate the distance from the object in the water detected by the JSN-SR04T sensor.
MeshBots:
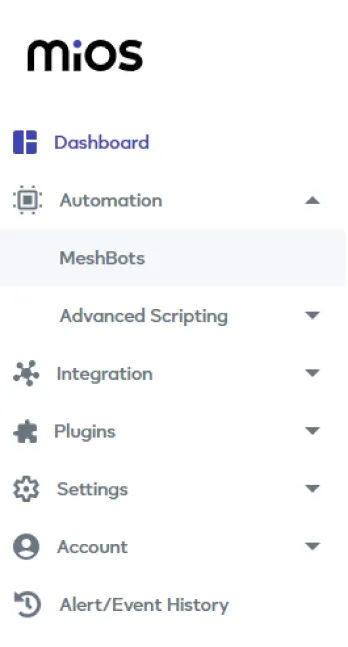
- On the left side of the screen under Automation, click on MeshBots.
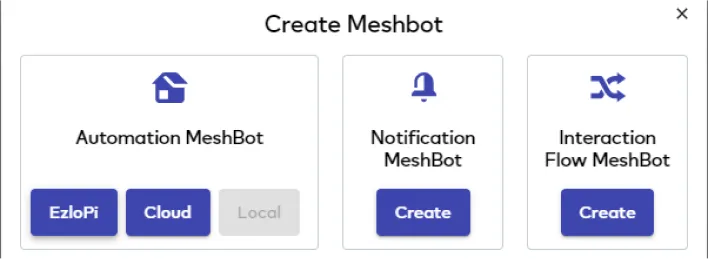
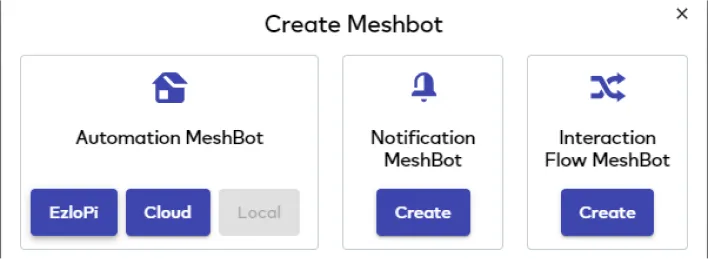
- On meshbot screen, click on Create new MeshBot button present on the top right corner of the screen.
- After clicking on Create new MeshBot, you will see this now under Automation MeshBot click on Cloud.
- On the next screen you will see that we can create a name of our choosing, in this case we write it as 001.
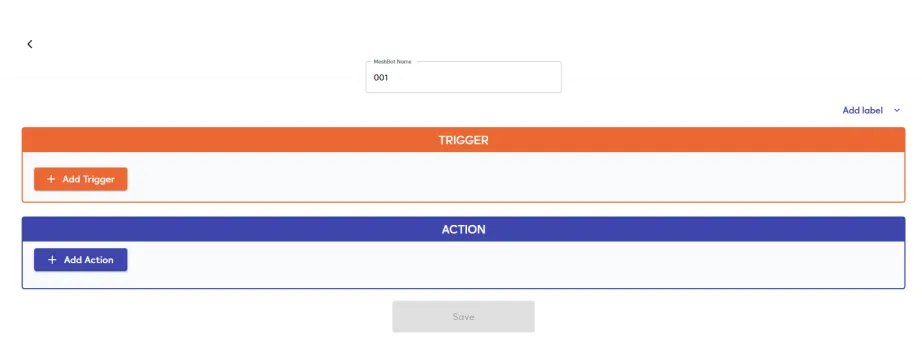
- In the trigger tab you can set the TRIGGER for your device and in the ACTION tab you can set the action to be performed based on the trigger which you have created.

- Set these things in TRIGGER section:
- Set Node Type to Device.
- Set the Node to Ultrasonic Sensor.
- Set the Capability to parent_abstract.
- Set the variables to uuid.
- Set the Comparator to Equal (==).
- Set the Value Type to value.
- Set the value to 20m.

- Set these values in the TRUE part of the ACTION section.
- Set Controllable Type to Device.
- Set the Controllable to LED.
- Set the Capability to power_command.
- Set the Value Type to set.
- Set the value to true.

- After clicking the save button you can see this screen on the top right corner of the screen.
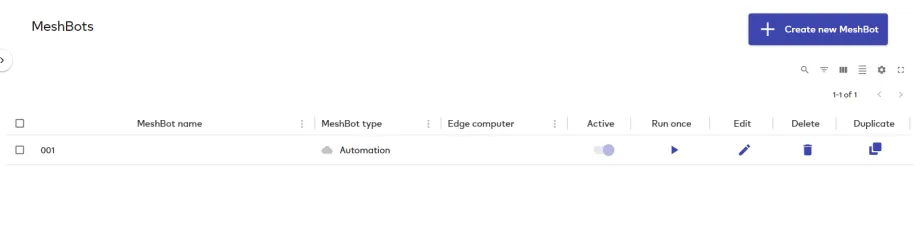
- After clicking the save button you can see this screen on the top right corner of the screen.
- Here you can see your saved MeshBot. Now again on Create new Meshbot.
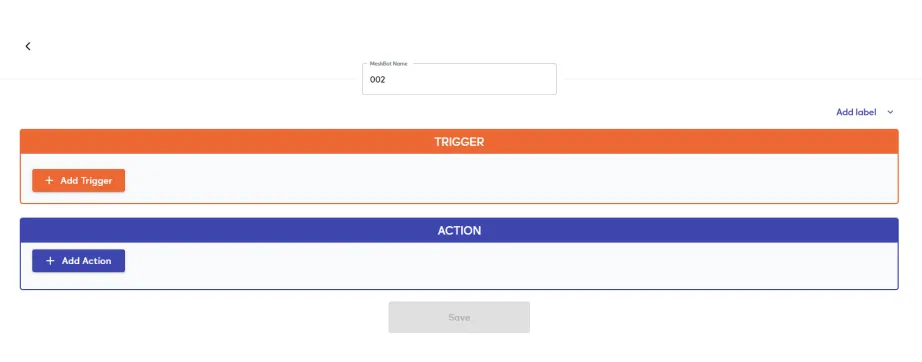
- On the next screen you will see that we can create a name of our choosing, in this case we write it as 002.

- In the trigger tab you can set the TRIGGER for your device and in the ACTION tab you can set the action to be performed based on the trigger which you have created.
- Set these things in TRIGGER section:
- Set Node Type to Device.
- Set the Node to Ultrasonic Sensor.
- Set the Capability to parent_abstract.
- Set the variables to uuid.
- Set the Comparator to Equal (==).
- Set the Value Type to value.
- Set the value to 10m.

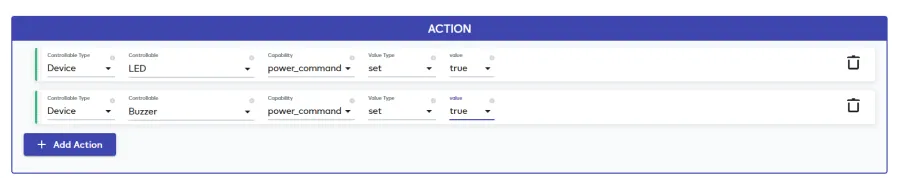
- Set these values in the TRUE part of the ACTION section.
- Set Controllable Type to Device.
- Set the Controllable to LED.
- Set the Capability to power_command.
- Set the Value Type to set.
- Set the value to true.
- Add another action by clicking the Add Action button.
- Set Controllable Type to Device.
- Set the Controllable to Buzzer.
- Set the Capability to power_command.
- Set the Value Type to set.
- Set the value to true.
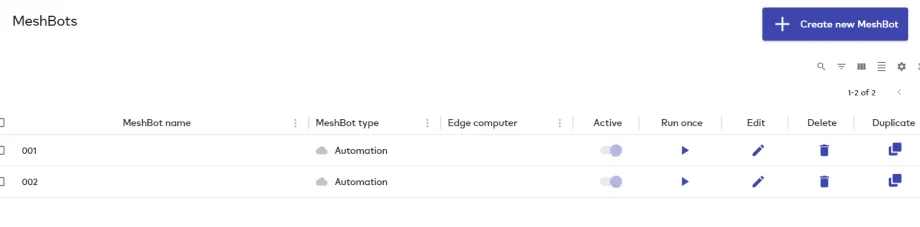
- After clicking the save button you can see this screen on the top right corner of the screen.
- Here you can see your saved MeshBot. Now click on Dashboard.
- Now in the MiOS web dashboard, we can see that when the distance reaches a certain value which is 20 meters, then the LED turns ON for the first alert about the nearing object because of the rules we have set in meshbot.
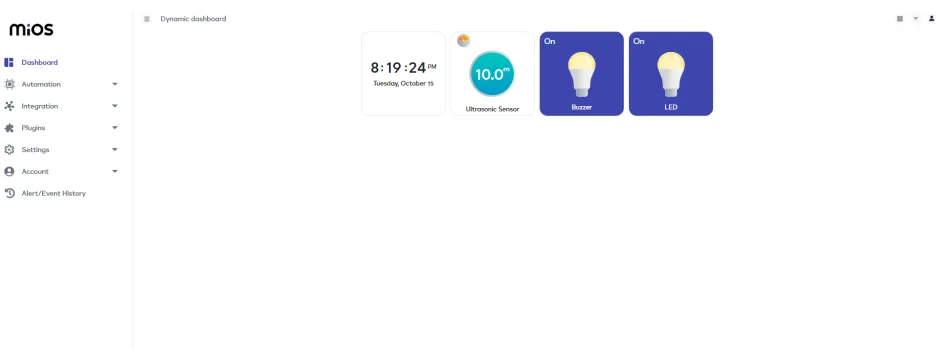
- Here in the above picture, we can see that when the distance reaches a value of 10 meters, then the LED and buzzer both turn ON to fully alert to avoid hitting the object because of our meshbot settings.
6. MiOS App
You can download the MIOS Android app from the Google Play Store and Apple App Store.


- After downloading the app, proceed to install the application and open it.

- Using the MIOS mobile application, create a new Ezlo Cloud account using the sign-up option. If you already have an account, you may proceed to log in.

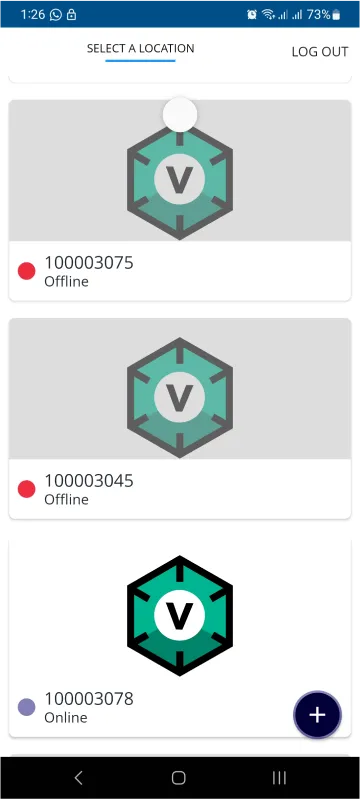
- After successfully logging in, you will be able to see the number of controllers connected such as a lamp, fan, or any other device in the MiOS app. Tap on any controller of your desired ID:
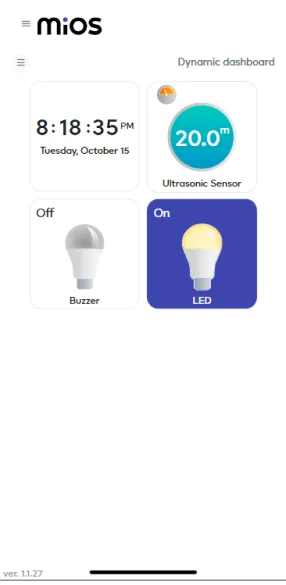
- You will be able to see the status of your controller whether it is online or offline. Access the device dashboard, and tap the device. The following view of the dashboard will appear:
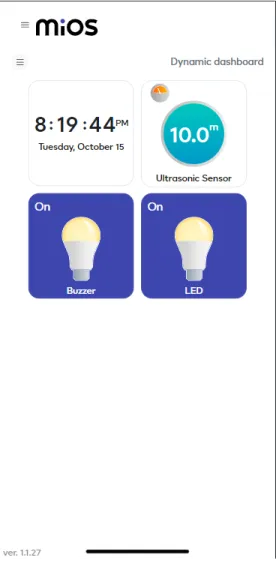
- Now as seen on the MiOS mobile dashboard, we can see that when the distance reaches a certain value which is 20 meters, then the LED turns ON for the first alert about the nearing object because of the rules we have set in meshbot.

- Here in the above picture, we can see that when the distance reaches a value of 10 meters, then the LED and buzzer both turn ON to fully alert to avoid hitting the object because of our meshbot settings.